Ecuaciones Diferenciales
ECUACIONES DIFERENCIALES
Las ecuaciones diferenciales:
son aquellas que relacionan a una función con una o más de sus derivadas,Esto significa que su solución es una función.
El orden de una ecuación diferencial:
( ordinaria o en derivadas parciales ) es el de la derivada de mayor orden que aparece en la ecuación.
Se denomina orden de la ecuación al de la derivada de mayor orden que interviene en la ecuación.
El grado de la ecuación diferencial:
es la potencia de la derivada de mayor orden que aparece en la ecuación, siempre y cuando la ecuación esté en forma polinómica, de no ser así se considera que no tiene grado.
son aquellas que relacionan a una función con una o más de sus derivadas,Esto significa que su solución es una función.
El orden de una ecuación diferencial:
( ordinaria o en derivadas parciales ) es el de la derivada de mayor orden que aparece en la ecuación.
Se denomina orden de la ecuación al de la derivada de mayor orden que interviene en la ecuación.
El grado de la ecuación diferencial:
es la potencia de la derivada de mayor orden que aparece en la ecuación, siempre y cuando la ecuación esté en forma polinómica, de no ser así se considera que no tiene grado.

donde el operador diferencial L es un operador lineal, y es la función incógnita o desconocida (una función que podría ser dependiente del tiempo y(t)), y del lado derecho f es una función conocida de la misma naturaleza que y (denominada término de excitación). Para una función dependiente del tiempo se puede escribir la ecuación más detalladamente como:

y también se puede usar la notación con corchetes:
![{\displaystyle L[y(t)]=f(t)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/093084cbc2e15beb80d221db7a21bbf6896718df)
El operador lineal L puede ser de la siguiente forma:1

o sino:
- Un problema de valor inicial (también llamado por algunos autores como el problema de Cauchy) es una ecuación diferencial ordinaria con un valor especificado, llamado la condición inicial, de la función desconocida en un punto dado del dominio de la solución
- Un problema de valor inicial es una ecuación diferencial
-
- con
donde es un conjunto abierto , junto con un punto en el dominio de
- ,
- Teorema de existencia y unicidad:
- Es un resultado Matemático de gran importancia dentro del estudio de las ecuación diferencial ordinaria (EDOs). Establece bajo qué condiciones puede asegurarse la existencia y unicidad de solución de una EDO dado un problema de cauchy (problema de valor inicial).
- Variables Separables y Reducibles:Sólo es posible aplicar la técnica de separación de variables a aquellas funciones que han sido transformadas, de manera tal,que el diferencial de la variable particular sólo aparece con una función definiendo esta variable y no con otra función.
- El método de separación de variables es una de las varias técnicas utilizadas para resolver las ecuaciones diferenciales.
- Esta técnica de solución de ecuaciones diferenciales tiene su base en la suposición de que para una función definida como:habrá una respuesta para alguna secuaciones diferenciales parciales homogéneas definidas de forma lineal. Esta ecuación diferencial será definida para las variables x y t. Hacer esta suposición reducirá las ecuaciones diferenciales en funciones definidas separadamente que son sumadas juntas, ya que sabemos que todas las funciones indefinidas en cada ecuación diferencial dada es constante si tenemos el producto de estas funciones con las variables independientes como términos constantes.Estas funciones definidas separadamente, pueden ser finalmente, integradas por separado utilizando las técnicas adecuadas de integración y se suman juntas para obtener el resultado final.Por ejemplo, para la ecuación diferencial u/ t = c ( 2u/ x2) dada u(x, 0) = f(x), u(0, t) = 0 y u(L, t) = 0, podemos aplicar la técnica de separación de variables.
- Exactas y no Exactas:
- En este artículo aprenderás a obtener con facilidad los factores integrantes para diferentes tipos de Ecuaciones Diferenciales (EDO’s lineales 1er orden, EDO’s de Bernoulli, EDO’s no exactas hechas exactas), utilizando álgebra para deducir dichos factores, así como las leyes de derivación e integración.
- Son exactas si cada termino derivado por la variable contraria a su diferencial es igual al otroSi expresamos la ecuación como M(x,y)dx + N(x,y)dy tenemosdM(x,y)/dy = xdN(x,y)/dx = 4xEfectivamente no es exacta. Entonces hay que hallar el factor integrante, que es una función que multiplicando a los dos términos hace que la ecuación sea exacta.
- Factor Integrante:
- https://youtu.be/WKS-86kgs1k
- El factor integrante se define como: e^∫p(x)dx,una vez hallado el factor integrante el siguiente paso es multiplicar la ecuación por dicho factor, entonces tenemos: e^∫p(x)dx [y^'+p(x)y]=e^∫p(x)dx [f(x)], lo interesante de esta ecuación resultante es que la parte izquierda de la igualdad es igual a la derivada con respecto a x del factor integrante multiplicada por y es decir: d/dx[e^∫p(x)dxy]= e^∫p(x)dx [f(x)], esta relación se puede demostrar fácilmente si efectuamos la derivada del producto de la parte izquierda de la ecuación, y vemos que efectivamente que es equivalente a la ecuación que teníamos anteriormente. Una vez expresada la ecuación de la manera: d/dx[e^∫p(x)dxy]= e^∫p(x)dx [f(x)], vemos que esta se resuelve fácilmente por el método de variables separables, es decir podemos separar las variables, luego integrar y despejar a y de la ecuación, que es en sí lo que se busca para solucionar este tipo de ecuaciones. En el video se muestra de manera detallada el procedimiento del factor integrante aplicándolo a problemas numéricos.
- Ecuaciones Lineales:
- En matemáticas y álgebra lineal, un sistema de ecuaciones lineales, también conocido como sistema lineal de ecuaciones o simplemente sistema lineal, es un conjunto de ecuaciones lineales (es decir, un sistema de ecuaciones en donde cada ecuación es de primer grado), definidas sobre un cuerpo o un anillo conmutativo. Un ejemplo de sistema lineal de ecuaciones sería el siguiente:El problema consiste en encontrar los valores desconocidos de las variables x1, x2 y x3 que satisfacen las tres ecuaciones.El problema de los sistemas lineales de ecuaciones es uno de los más antiguos de la matemática y tiene una infinidad de aplicaciones, como en procesamiento digital de señales, análisis estructural, estimación, predicción y más generalmente en programación lineal así como en la aproximación de problemas no lineales de análisis numérico.
- Ecuación de Bernoulli:
La ecuación de Bernoulli
se reduce a una ecuación lineal de primer orden haciendo la sustitución . Demostración:Al dividir la ecuación 1.12 por
. Demostración:Al dividir la ecuación 1.12 por , resultaUsando la regla de la cadena, calculemos
, resultaUsando la regla de la cadena, calculemos a partir de la sustitución
a partir de la sustitución 
Sustituyendo en la ecuación 1.13, esta se transforma en
la cual es una ecuación diferencial lineal de primer orden, como se quería.Ejemplo:
Resuelva la ecuación
SoluciónÉsta es una ecuación de Bernoulli con ,
,  y
y  . Para resolverla primero dividamos por
. Para resolverla primero dividamos por 

Ahora efectuemos la transformación . Puesto que
. Puesto que  , la ecuación se transforma en
, la ecuación se transforma en
Simplificando obtenemos la ecuación lineal

- ECUACIONES DIFERENCIALES LINEALES DE ORDEN SUPERIOR
- Definion de Ec. Di. de Orden Superior:
- Las ecuaciones diferenciales lineales de orden superior se pueden clasificar en homogéneas (igual a cero) y no homogéneas (igual a una función de x). En este tutorial se explica este concepto y como se relaciona la solución de una ED homogénea con la de una ED No homogénea. Para ello se explica primero el principio de superposición que permite conocidas n soluciones linealmente independiente para una ED Lineal homogénea de orden n encontrar su solución general. Luego se procede a establecer que la solución a la no homogénea es la suma de la solución general de la homogénea más una solución particular.
- Una ecuación diferencial de orden n se denomina lineal si es lineal respecto a la variable dependiente y, y a todas sus derivadas hasta el orden n,de modo que se puede expresar de la forma:P0(x)⋅yn) + P1(x)⋅yn-1) + ... + Pn-1(x)⋅y' + Pn(x)⋅y = G(x)
donde P0, P1, ..., Pn - una curva de solución debe pasar por el punto (~0, yo) y tener la pendiente y1 en ese punto.Existencia y unicidad En la sección 1.2 enunciamos un teorema que especifica las condiciones para garantizar la existencia y unicidad de una solución de un problema de valores iniciales de primer orden. El teorema siguiente describe las condiciones suficientes de existencia de solución única para el problema representado por las ecuaciones (1).Existencia de una solución única: son funciones definidas en un intervalo (a, b) de la recta real.Se denomina problema de valor inicial o problema de Cauchy de la ecuación diferencial de orden n (10.1.1), al problema que consiste en encontraruna solución ϕ(x) de la ecuación diferencial que verifique n condiciones iniciales ϕ(x0) = y0, ϕ’(x0) = y1, ..., ϕn-1)(x0) = yn-1, siendo x0 ∈ (a, b), y0, y1, ...,yn-1 números reales cualesquiera.Si las condiciones que debe verificar la solución están definidas en dos o más puntos diferentes el problema se denomina problema de contorno de una ecuación diferencial.
- PROBLEMA DE VALOR INICIAL
- En la sección 1.2 definimos qué es un problema de valores iniciales para una ecuación diferencial general de orden n. Para una ecuación diferencial lineal, un problema de valores iniciales de orden n es
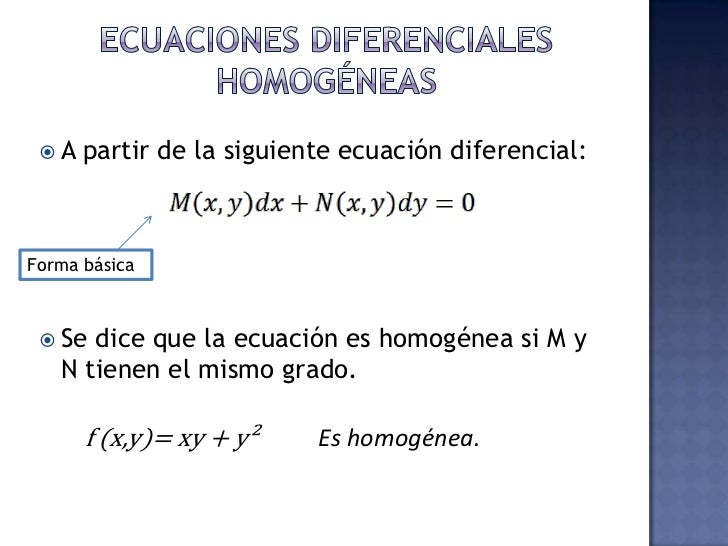
- ECUACIONES DIFERENCIALES HOMOGÉNEAS
- Se llama no homogénea; por ejemplo, 2~” + 3y’ - 5y = 0 es una ecuación diferencial de segundo orden, lineal y homogénea, mientras que x3y”’ + 6y’ + 1 Oy = ex es una ecuación diferencial de tercer orden, lineal y no homogénea. En este contexto, la palabra homogénea no indica que los coeficientes sean funciones homogéneas, como sucedía en la sección 2.4. Para resolver una ecuación lineal no homogénea como la (7), en primera instancia debemos poder resolver la ecuación homogénea asociada (6).
- PRINCIPIO DE SUPERPOSICIÓN
- ecuaciones homogéneassean Yl, Y2, * . . , yk soluciones de la ecuación diferencial homogénea de n, ecuación (6), donde x esta en un intervalo 1. La combinación linealen donde las c~,i=1,2 ,..., R son constantes arbitrarias, también es una solución cuando x está en el intervalo.DEMOSTRACIÓN Probaremos el caso k = 2. Sea L el operador diferencial definido en (8) y sean yt(x) y yz(x) soluciones de la ecuación homogénea L(y) = 0. Si definimos y = ct yt(x) + c2y x), entonces, por la linealidad de L,
-
- DEPENDENCIA E INDEPENDENCIADado un conjunto de funciones {y1, y2, ..., yn} definidas en un intervalo (a, b) se dice que son linealmente dependientes en el intervalo (a, b), si existen n constantes α1, α2, ..., αn no todas nulas, tales que: α1⋅y1 + α2⋅y2 + ... + αn⋅yn Si por el contrario se verifica que esta identidad solamente se cumple cuando α1 = α2 = ... = αn = 0, entonces se dice que las funciones {y1, y2, ..., ynDefinición: son linealmente independientes en el intervalo (a, b).Dado un conjunto de funciones {y1, y2, ..., yn} derivables hasta el orden n − 1, se denomina wronskiano de estas funciones y se denota por W[y1, y2, ..., yn W[y] a la función
- definida por el siguiente determinante: 1, y2, ... , yn)x(y...)x(y)x(y ............ )x('y...)x('y)x('y )x(y...)x(y)x(y n )n)n)n n n 1 2 1 1 1 12 12 −−− ](x) = .Teorema: Si las funciones y1, y2, ..., ynDemostración: son linealmente dependientes en el intervalo (a, b), entonces su wronskiano en ese intervalo es la función nula
- WRONSKIANO
- El wronskiano es un determinante introducido en 18121 por el matemático polaco Józef Hoene-Wroński (1776-1853) y nombrado en 18822 por el matemático escocés Thomas Muir (1844 – 1934). Se utiliza en el estudio de las ecuaciones diferenciales ordinarias, donde a veces puede ser utilizado para mostrar que un conjunto de soluciones es linealmente independiente.
Dado un conjunto de n funciones que son (n-1)-veces derivables, f1, ..., fn, el wronskiano W(f1, ..., fn) está dado por: - ECUACIÓN DIFERENCIAL LINEAL HOMOGÉNEA CON COEFICIENTES CONSTANTES
Se parte de la ecuación más simple, de primer orden, donde se muestra que la solución siempre es del tipo y=ce^(mx) y se asume que para ecuaciones de orden superior como la ecuación de segundo orden la solución es una exponencial con esta forma. Al hacer esto el problema se reduce a encontrar los valor de m que hacen que la ecuación se haga cero (ya que es homogénea), formándose una ecuación auxiliar que depende solo de los valores de m. En el caso de una ecuación de segundo orden se presentan 3 casos para los valore de m. El primero; que las raíces de la ecuación auxiliar sean distintas y reales, el segundo; las raíces son reales e iguales y el tercero; que ambas sean complejas conjugadas. Para cada caso se ilustra como formar la solución general que soluciona la ecuación diferencial homogénea con coeficientes constantes.
El procedimiento aplica de igual forma para ecuaciones de orden superior, pero esto se ilustra mejor en los otros video tutoriales que se desarrollaron como ampliación a este.- ECUACIÓN DIFERENCIALES LINEALES DE ORDEN SUPERIOR
- En una ecuación diferencial lineal de orden n homogénea, el conjunto de soluciones tiene estructura de espacio vectorial de dimensión n, por lo que basta encontrar n soluciones linealmente independientes para obtener la solución general. El conjunto de soluciones de cualquier ecuación diferencial lineal de orden n completa tiene estructura de espacio afín, que tiene como espacio vectorial asociado el conjunto de soluciones de la ecuación homogénea asociada. En consecuencia, si se conoce la solución general de la ecuación homogénea asociada, para tener la solución general de la ecuación completa es suficiente encontrar un punto de ese espacio afín, es decir, una solución particular de esta ecuación.
- ECUACIONES DIFERENCIALES LINEALES NO HOMOGEMEAS
- Los métodos que se estudian a continuación están indicados, especialmente, para resolver ecuaciones diferenciales lineales con coeficientes constantes, pues con ellos generalmente resulta más fácil obtener una solución particular de la ecuación no homogénea que con el método general de variación de las constantes
- METODO DEL ANULADORSe considera la ecuación diferencial L(y) = G(x), donde el operador L tiene coeficientes constantes. El método consiste en encontrar un operador A con coeficientes constantes que anule la función G, es decir, A(G) = 0. De este modo, aplicando el operador A a la ecuación dada, se obtiene A ⋅ L(y) = A(G) = 0 de forma que las soluciones de L(y) = G(x) también son soluciones de la ecuación homogénea A ⋅ L(y) = 0. Se resuelve esta ecuación y entre sus soluciones se elige una que satisfaga L(y) = G(x). Conocida una solución particular de la ecuación completa, ϕp, por el teorema 10.2.11, la solución general, ϕg, de esta ecuación se expresa por ϕg = ϕp + ψH, siendo ψH. Se puede aplicar el método del anulador cuando se encuentre un operador con coeficientes constantes que anule el término G(x), lo que sólo es posible cuando éste es de la forma: x la solución general de la ecuación homogénea asociada.A continuación se incluye una lista de posibles funciones y de su correspondiente anulador:Función G(x) Operador anuladorG(x) = x D m-1 mG(x) = e D − α αxG(x) = xm-1 ⋅ e (D − α) αx m
- G1(x) = cos βx; G2 D (x) = sen βx 2 + β2G1(x) = xm-1 ⋅ cos βx; G2(x) = xm-1 (D ⋅ sen βx 2 + β2)mG1(x) = eαx ⋅ cos βx; G2(x) = eαx (D − α) ⋅ sen βx 2 + β2G1(x) = xm-1 ⋅ eαx ⋅ cos βx; G2(x) = xm-1 ⋅ eαx ((D − α) ⋅ sen βx 2 + β2)m
- METODOS DE LOS COEFICIENTES INDTERMINADOS
- Se considera la ecuación diferencial yn) + p1 ⋅ yn-1) + ... + pn-1 ⋅ y' + pn ⋅ y =G(x) donde p1, p2, ..., pn G(x) = e son constantes y G(x) una función continua en un intervalo de la recta real. Como en el método anterior, por aplicación del teorema 4.2.11, obtener la solución general de esta ecuación se reduce a encontrar una solución particular de la ecuación y la solución general de la ecuación homogénea asociada y sólo se puede aplicar este método cuando la función G(x) sea de la forma: αx⋅(Qm(x)⋅cos βx + Rr siendo Q (x)⋅sen βx), m(x) y Rr Si G(x) = e (x) polinomios de grado m y r respectivamente, o bien cuando la función G sea una combinación lineal de este tipo de funciones. αx⋅(Qm(x)⋅cos βx + Rr(x)⋅sen βx), una solución particular ϕp ϕ de la ecuación diferencial completa es: p = xs⋅eαx⋅(Sk(x)⋅cos βx + Tk siendo k = max(m, r); S(x)⋅sen βx), k(x) y TkSe observa que, en la práctica, este método coincide con el método del anulador. (x) polinomios de grado k de coeficientes indeterminados que hay que calcular y s el orden de multiplicidad de la raíz de la ecuación característica λ = α ± iβ de la ecuación homogénea. En particular cuando las raíces no son de la forma α ± iβ, entonces s toma el valor 0.
En ocasiones cuando en la ecuación diferencial L(y) = G(x), la función G(x) contiene las funciones trigonométricas sen βx, cos βx se puede expresar fácilmente como una función exponencial compleja. Considerar y resolver la ecuación en el plano complejo muchas veces simplifica los cálculos. - LA TRANSFORMACION DE LA PLACE
- La transformada de Laplace es un operador lineal muy útil para la resolución de ecuaciones diferenciales.Laplace demostró cómo transformar las ecuaciones lineales no homogéneas en ecuaciones algebraicas que pueden resolverse por medios algebraicos.Denotamos al operador de Laplace por L, y como operador, actúas obre una función f y devuelve otra función L[f] Dentición 1. La transformada de Laplace de una función f(t), 0 ≤ t ≤∞ es una función L[f] de una variable real s dada por: (F(s) =)L[f](s) =Z∞ 0 f(t)e−stdt = lím τ→∞Zτ 0 f(t)e−stdt (1.1) Está definida para tod s∈R donde la integral tenga sentido.Condiciones suficientes para la existencia de zv(t)} No es necesa.+ que converja la integral que define ala transformada de Laplace; por ejemplo, ni Ce{ llt} ni Cee’ }existen. Las condiciones de suficiencia que garantizan la existencia de 3 (f(t)} son que f sea continua por tramos en [0, -), y quef sea de orden exponencial cuando t > T. Recuerdese que una función es continua por tramos en [0, -) si, en cualquier intervalo 0 L a 5 t L b hay, cuando
- mucho, una cantidad finita de puntos tk, k = 1,2, . . . , n (tk-r < tk) en los cuales f tiene discontinuidades finitas y es continua en todo intervalo abierto tk-1 < t < tk. (Fig. 7.2). A continuación definiremos el concepto de orden exponencial.
- Aunque para una demostración rigurosa se requiere la inducción matemática, de los resultados anteriores parece razonable concluir que, en generalDejamos al lector la demostración de las partes f) y g) del teorema.Transformada de una función a trozos lineal por partes
- Calcular la transformada:f(t) = 1, si 0≤t < 1 2−t, si 1≤t < 2 0, si 2≤tEsta funci´on la puedo escribir de la siguiente forma:f(t) = (H(t)−H(t−1))+(2−t)(H(t−1)−H(t−2)) = H(t)−(t−1)H(t−1)+(t−2)H(t−2)
Por tanto: - L[f] =L[H(t)]−L[(t−1)H(t−1)]+L[(t−2)H(t−2)] = (usando el teorema de corrimiento)=1 s −e−s1 s2 +e−2s1 s2 = s−e−s −e−2s s2 , s > 0Nota 2. Una función f(t) puedo activarse en t = a si se multiplica por H(t−a)Descripción de la Lección: Se encuentra la transformada de laplace mediante definición de la función a tramos f(t) = -1 si t es menor que 2 y f(t) = -5t^2+5t+4 para t mayor o igual a 2.
La transformada de laplace al ser una integral definida nos permite ser calculada mediante una suma de integrales para el caso de una función a tramos.
En este problema en particular se presentaron dos dificultades a la hora de calcular las integrales. Una debido a que se tuvo que hacer uso de la integración por partes con recurrencia y la segunda encontrar el límite de un polinomio de t sobre una función exponencial en t cuando la t tiende a infinito (para lo cual se muestra que el límite siempre es cero).
En este video resolveremos un problema de transformada de Laplace para una función por tramos utilizando la definición de trasformada de Laplace, el problema es el siguiente: Halle la transformada de Laplace para la función a tramos definida de la siguiente manera: tramos f(t) = -1 si t es menor que 2 y f(t) = -5t^2+5t+4 para t mayor o igual a 2. Para resolver este problema, recordemos primero la definición de transformada de Laplace para una función cualquiera: L[f(t)]=∫(e^(-st) )f(t)dt, como en este caso tenemos que la función, es una función a tramos, lo que debemos hacer es hallar la integral de cada tramo individualmente y luego sumar los resultados de las integrales , teniendo en cuenta lo anterior, tenemos entonces, que la trasformada de Laplace para la función del problema se puede hallar de la siguiente manera: L[f(t)]=∫(e^(-st) )(-1)dt+∫(e^(-st) )(-5t^2+5t+4 )dt, en donde la primera integral se evalúa entre cero y dos y la segunda integral se evalúa entre dos y más infinito.
- Resolviendo la primera integral, tenemos lo siguiente: ∫(e^(-st) )(-1)dt=[(e^-st)/s], evaluando entre cero y dos tenemos que: ∫(e^(-st) )(-1)dt=[(e^-2s)]/s-(1/s). Una vez encontrada la solución de la primera integral, procedemos a hacer la segunda integral:∫(e^(-st) )(-5t^2+5t+4 )dt, como vemos esta integral es mucho más compleja que la primera y se resuelve por integración por partes con recurrencia, una vez se halla la solución de esta integral, vemos que la transformada de Laplace para la función por tramos es igual a: L[f(t)]= [(e^-2s)]/s-(1/s)-6[(e^-2s)/s]-15[(e^-2s)/s^2]-10[(e^-2s)/s^3], como vemos la trasformada es igual a la suma de las dos integrales como ya se había dicho. En el video se muestra de manera detallada como se efectúa la segunda integral y como se evalúan los límites del resultado para legar a la solución deseada.
- Función escalón unitario En ingeniería se presentan con mucha frecuencia funciones que pueden estar “encendidas” o “apagadas”. Por ejemplo, una fuerza externa que actúa sobre un sistema mecánico o un voltaje aplicado a un circuito se pueden apartar después de cierto tiempo. Por ello, conviene definir una función especial, llamada función escalón unitario.
- PROPIEDADES DE LA TRANSFORMADA DE LAPLACEEl uso de esta definición para obtener una expresión explícita para l{f} requiere la evaluación de la integral impropia, lo que con frecuencia es una tarea tediosa. Ya hemos visto que la propiedad de linealidad de la transformada nos puede ser de ayuda. En esta sección analizamos algunas propiedades adicionales de la transformada de Laplace que simplifican su cálculo. Estas nuevas propiedades nos permitirán usar la transformada de Laplace para resolver problemas con valores iniciales.
- TEMA IV.-ECUACIONES DIFERENCIALES LINEALES Y SISTEMAS DE ECUACIONESProcedimiento de ecuaciones diferenciales lineales:Ecuaciones lineales de orden superior.Supongamos que tenemos una ecuaciónan(x)y (n) + an−1(x)y (n−1) + · · · + a1(x)y ′ + a0(x)y = g(x) con n > 1.En primer lugar, conviene dejar constancia de que existe una teoría general bien establecida sobre ecuaciones diferenciales lineales de cualquier orden. Pero este es un estudio esencialmente teórico: no es posible describir la solución general de una E. D. E. D. en las que se puede reducir el orden 37 lineal de orden 2 o superior por medio de cuadraturas. Sin embargo, sí que se calculan las soluciones de forma muy satisfactoria cuando nos encontramos ante ecuaciones lineales con coeficientes constantes (es decir, cuando ai(x) = ai ∈ R, 0 ≤ i ≤ n).Pero todo esto queda fuera de los objetivos que estamos persiguiendo aquí. Fundamentalmente, en este apartado nos preocuparemos sólo de ver como una ecuación lineal de orden n > 1 puede reducirse de orden, sucesivamente si es necesario, hasta llegar a una ecuación lineal de primer orden.En realidad, este método de reducción de orden radica en haber encontrado previamente una solución particular de la lineal homogénea asociadaan(x)y (n) + an−1(x)y (n−1) + · · · + a1(x)y ′ + a0(x)y = 0;si no hemos sabido hallar tal solución particular, el proceso aquí descrito no tiene para nosotros ninguna utilidad práctica.Supongamos pues que hemos logrado encontrar una solución particular yn(x) de la homogénea asociada (más adelante se pondrá de manifiesto por que resulta adecuado introducir una n en la notación de la solución particular). En este caso, efectuamos el cambio de función y por z dado por y(x) = yn(x)z(x).Sin más que derivar sucesivamente, obtenemosy ′ (x) = y ′ n (x)z(x) + yn(x)z ′ (x) y ′′(x) = y ′′ n (x)z(x) + 2y ′ n (x)z ′ (x) + yn(x)z ′′(x) . . . y (n) (x) = y (n) n (x)z(x) + · · · + n k y (k) n (x)z (n−k) (x) + · · · + yn(x)z (n) (x).Sustituyendo en la lineal, y sacando factor común losz (k) , queda anynz (n) + (nany ′ n + an−1yn)z (n−1) + · · · + (nany (n−1) n + · · · + 2a2y ′ n + a1yn)z ′ + (any (n) n + · · · + a1y ′ n + a0yn)z = g(x).El coeficiente de z en la expresión anterior es 0 por ser precisamente yn solución de la ecuación lineal homogénea.Así, podemos ponerbn(x)z (n) + bn−1(x)z (n−1) + · · · + b1(x)z ′ = g(x).Esta es una E. D. de las estudiadas en el apartado anterior. Si en ella hacemos z ′ = u aparece bn(x)u (n−1) + bn−1(x)u (n−2) + · · · + b1(x)u = g(x), que es una ecuación lineal de orden n − 1. Si sabemos resolver esta nueva ecuación (por ejemplo, si n − 1 = 1 y aplicamos cualquiera de los métodos de resolución de E. D. lineales de primer orden ya estudiados), tendremos que su solución general será una función u(x) = φ(x, C1, . . . , Cn−1) dependiente de n − 1 constantes.Entonces, la solución de la de partida ser ‘a y(x) = yn(x)z(x) = yn(x) Z u(x) dx = yn(x) Z φ(x, C1, . . . , Cn−1) dx = yn(x) Z φ(x, C1, . . . , Cn−1) dx + Cnyn(x), donde Cn surge como constante de integración al calcular una primitiva de φ (que aparece representada con la misma notación de integral, esperando que este pequeño y habitual abuso de notación no introduzca confusión en el lector).Si no conseguimos resolverla en general, se puede intentar reducir el orden de nuevo encontrando ahora un−1(x) solución particular de la homogénea asociada. Si este proceso lo logramos hacer el suficiente número de veces, llegaremos siempre a una ecuación lineal de orden 1, que sí que sabemos resolver.Finalizaremos comentando como varios de los resultados estudiados para E. D. lineales de primer orden también pueden aplicarse a lineales de orden superior.En primer lugar, es inmediato comprobar que la solución general de la lineal puede expresarse como una solución particular de la lineal más la solución general de la lineal homogénea asociada. (Lógicamente, si la lineal ya es homogénea, puede tomarse como solución particular la función nula.)Por otra parte, el proceso de reducción de orden que hemos utilizado nos muestra, por inducción, que la solución general de la lineal de orden n puede expresarse como y(x) = yp(x) + C1y1(x) + · · · + Cn−1yn−1(x) + Cnyn(x), donde yp(x) es una solución particular de la lineal. En efecto, para orden n = 1 lo hemos probado al tratar las lineales de primer orden.Y, para efectuar el paso de inducción de orden n − 1 a n, basta fijarse en el desarrollo del proceso de reducción seguido. En efecto, por hipótesis de inducción, la solución de la E. D. en u(x) de orden n − 1 que nos aparecía tendrá la formau(x) = φ(x, C1, . . . , Cn−1) = up(x) + C1u1(x) + · · · + Cn−1un−1(x). Por tanto, la solución de la ecuación de partida de orden n será y(x) = yn(x)z(x) = yn(x) Z u(x) dx = yn(x) Z φ(x, C1, . . . , Cn−1) dx = yn(x) Z up(x) + C1u1(x) + · · · + Cn−1un−1(x) dx = yn(x) Z up(x) dx + C1 Z u1(x) dx + · · · + Cn−1 Z un−1(x) dx + Cn = yn(x) Up(x) + C1U1(x) + · · · + Cn−1Un−1(x) + Cn = yp(x) + C1y1(x) + · · · + Cn−1yn−1(x) + Cnyn(x), E. D. en las que se puede reducir el orden 39 tal como queríamos comprobar.También existe el método de variación de las constantes para E. D. lineales de orden n, y está destinado a resolver la ecuación lineal cuando se conoce la solución general de la homogénea asociada, y(x) = C1y1(x) + C2y2(x) + · · · + Cnyn(x). En estas condiciones, se busca la solución de la lineal de la forma y(x) = C1(x)y1(x) + C2(x)y2(x) + · · · + Cn(x)yn(x) para ciertas funciones Ck(x) a determinar.Para encontrar estas Ck(x), se deriva sucesivamente la expresión anterior y se sustituye en la ecuación lineal, igualando a cero los coeficientes de los yk(x). Aunque no nos preocuparemos de ello, puede demostrarse rigurosamente que esto siempre conduce a la solución buscada.Son de la forma an(x)y (n) + an−1(x)y (n−1) + · · · + a1(x)y ′ + a0(x)y = g(x). Si logramos encontrar alguna solución yn(x) de la lineal homogénea asociada, el cambio de función y = ynz hace que la lineal se transforme en una del tipo anterior, cuyo orden se puede reducir. Así, aparece una nueva ecuación lineal, esta vez de orden n − 1. Ejemplo 11′ . Resolver xy′′ + (7x − 1)y ′ − 7y = x 2 e −7x sabiendo que la lineal homogénea asociada tiene una solución de la forma e ax .En primer lugar, determinemos a para que y2 = e ax sea solución de xy′′ + (7x−1)y ′ − 7y = 0. Derivando, y ′ 2 = aeax , y ′′ 2 = a 2 e ax; sustituyendo, a 2xeax + (7x−1)aeax −7e ax = 0, es decir, [x(a 2 + 7a) − a − 7]e ax = 0, lo cual se consigue con a = −7.Apliquemos ahora el método de reducción de orden. Tomamos y = y2z, con lo cual, derivando, y ′ = y ′ 2 z + y2z ′ , y ′′ = y ′′ 2 z + 2y ′ 2 z ′ + y2z ′′. Si sustituimos en la lineal, queda (y ′′ 2 z + 2y ′ 2 z ′ + y2z ′′)x + (7x − 1)(y ′ 2 z + y2z ′ ) − 7y2z = x 2 e −7x .Sacando factor común z ′′ , z ′ y z, aparece xy2z ′′ + [2xy′ 2 + (7x − 1)y2]z ′ + [xy′′ 2 + (7x − 1)y ′ 2 − 7y2]z = x 2 e −7x . Como el coeficiente de z coincide con la lineal homogénea, de la que y2 es solución, esta ecuación, tras sustituir y2 e y ′ 2 , se transforma en xe−7x z ′′ + [−14xe−7x + (7x − 1)e −7x ]z ′ = x 2 e −7x .Simplificando e −7x , podemos poner xz′′ + (−7x − 1)z ′ = x 2 . (Nótese que suele ser más cómodo utilizar el símbolo y2 en lugar de su expresión concreta ya que, de este modo, no hace falta arrastrar tampoco las expresiones de y ′ 2 ni y ′′ 2 , sino que basta con dar su valor al final de las simplificaciones.Por el contrario, si empleamos directamente las expresiones de y2, y ′ 2 e y ′′ 2 desde el principio, esto puede ayudarnos a detectar algún error que hayamos podido cometer: es fácil que el error nos llevara a un punto sin salida en el que no se podría continuar el proceso al no anularse el coeficiente de z.)Tenemos ahora una E. D. de segundo orden en z(x) en la que no aparece explícitamente z. Para reducirla de orden, basta tomar z ′ = u, con lo cual queda xu′ + (−7x − 1)u = x 2 , esto es, u ′+(−7− 1 x )u = x, lineal de primer orden.Resolvámosla aplicando directamente la formula general que hemos deducido en el apartado 5. Así, sin más que tomar a(x) = −7− 1 x y b(x) = x, calculando previamenteexp Z a(x) dx = exp Z − 7 − 1 x dx = exp(−7x − log x) = x −1 e −7x ,tendremos que su solución esu(x) = xe7x Z xx−1 e −7x dx + C1 = xe7x −1 7 e −7x + C1 = −1 7 x + C1xe7x .Deshaciendo los cambios,y(x) = y2(x)z(x) = y2(x) Z u(x) dx = e −7x Z −1 7 x + C1xe7x dx = e −7x −x 2 14 + C1 Z xe7x dx = e −7x −x 2 14 + 1 7C1xe7x − C1 Z 1 7 e 7x dx = e −7x −1 14 x 2 + 1 7C1xe7x − 1 49C1e 7x + C2 = −1 14 x 2 e −7x + C1 1 7 x − 1 49 + C2e −7x .Cambiando la notación de C1 por 49C1, la solución general de la lineal de segundo orden queday(x) = −1 14 x 2 e −7x + C1(7x − 1) + C2e −7x .Sistema de ecuaciones diferenciales lineales con condiciones iniciales por medio dela transformada de Laplace:Aplicaciones Pasemos a describir algunas aplicaciones elementales donde intervienen sistemas de ecuaciones diferenciales lineales, con la transformada de Laplace.Resortes acoplados Dos masas, m1 y mz, están unidas a dos resortes, A y B, de masa insignificante cuyas constantes de resorte son kl y k2, respectivamente, y los resortes se fijan como se ve en la figura 7.55. Sean XI(~) y xz(t) los desplazamientos verticales de las masas respecto a sus posiciones de equilibrio. Cuando el sistema está en movimiento, el resorte B que& sometido a alargamiento y a compresión, a la vez; por lo tanto, su alargamiento neto es x2 - xl. Entonces, según la ley de Hooke, vemos que los resortes A y B ejercen las fuerzas -klxl Y ~2@2 - XI), respectivamente, sobre ml. Si no se aplican fuerzas externas al sistema, y en ausencia de fuerza de amortiguamiento, la fuerza neta sobre ml es 41x1 + kz(xz - XI). De acuerdo con la segunda ley de Newton podemos escribir.
- TEMA V.-SERIES DE FOURIERFunciones ortogonales y series de FourierLas series e integrales de Fourier constituyen un tema clásico del Análisis Maten ático. Desde su aparición en el siglo XVIII en el estudio de las vibraciones de una cuerda, las series de Fourier se han convertido en un instrumento indispensable en el análisis de ciertos fenómenos periódicos de la Física y la Ingeniería. La idea fundamental se basa en aproximar la función, no por una serie de potencias (desarrollo de Taylor), sino por una serie de funciones periódicas (senos y cosenos). En lo que sigue consideraremos que las funciones con las que se trabaja son Riemann integrables en el intervalo correspondiente (bastaría, por ejemplo, suponer que son continuas salvo en un número finito de puntos donde presentan discontinuidades de salto).4.1. Funciones ortogonalesEl producto escalar de dos funciones f1 y f2 definidas en un intervalo [a,b] es el número hf1,f2i =Zb a f1(x)f2(x)dx Entonces la norma que induce este producto escalar de una función f definida en el intervalo [a,b] es el número kfk =Zb a f2(x)dx1 2 Definición 4.1.2. Dos funciones f1 y f2 son ortogonales en el intervalo [a,b] si hf1,f2i =Zb a f1(x)f2(x)dx = 0 Por ejemplo, las funciones f1(x) = x2 y f2(x) = x3 son ortogonales en el intervalo [−1,1] puesto que hf1,f2i =Z1 −1 x2x3 dx =Z1 −1 x5 dx =1 6 x6
1 −1 = 0 Definición 4.1.3. Se dice que un conjunto de funciones {φn}∞ n=0 es ortogonal en el intervalo [a,b] si hφm,φni =Zb a φm(x)φn(x)dx = 0, m 6= n Si {φn}∞ n=0 es un conjunto ortogonal de funciones en el intervalo [a,b] con la propiedad de que kφnk = 1 para cualquier n, entonces se dice que {φn}∞ n=0 es un conjunto ortonormal en el intervaloUna serie de Fourier es una serie infinita que converge puntualmente a una función periódica y continua a trozos (o por partes). Las series de Fourier constituyen la herramienta matemática básica del análisis de Fourier empleado para analizar funciones periódicas a través de la descomposición de dicha función en una suma infinita de funciones sinusoidales mucho más simples (como combinación de senos y cosenos con frecuencias enteras). El nombre se debe al matemático francés Jean-Baptiste Joseph Fourier, que desarrolló la teoría cuando estudiaba la ecuación del calor. Fue el primero que estudió tales series sistemáticamente, y publicó sus resultados iniciales en 1807 y 1811. Esta área de investigación se llama algunas veces análisis armónico.Es una aplicación usada en muchas ramas de la ingeniería, además de ser una herramienta sumamente útil en la teoría matemática abstracta. Áreas de aplicación incluyen análisis vibratorio, acústica, óptica, procesamiento de imágenes y señales, y compresión de datos. En ingeniería, para el caso de los sistemas de telecomunicaciones, y a través del uso de los componentes espectrales de frecuencia de una señal dada, se puede optimizar el diseño de un sistema para la señal portadora del mismo. Refiérase al uso de un analizador de espectros.Las series de Fourier tienen la forma: Series de Fourier de una función de periodo arbitrarioEl desarrollo en series de Fourier se basa en la propiedad de ortogonalidad de la funciones seno y coseno. Las series de Fourier son en cierta forma más generales que las series de Taylor, ya que pueden representar funciones periódicas discontinuas que pueden ser de gran interés práctico.La complicación más importante es que se manejan sumatorias infinitas y en algunos casos la convergencia puede ser un problema. Varias extensiones de las Fourier también son importantes como la transformada de Fourier y la transformada de Laplace, que se estudiarán más adelante.La teoría de Fourier ha sido aplicada con éxito en la solución de ecuaciones diferenciales, el estudio de vibraciones y ondas, procesamiento de señales, compresión de datos, procesamiento digital de imágenes y en muchos otros campos.
Series de Fourier de una función de periodo arbitrarioEl desarrollo en series de Fourier se basa en la propiedad de ortogonalidad de la funciones seno y coseno. Las series de Fourier son en cierta forma más generales que las series de Taylor, ya que pueden representar funciones periódicas discontinuas que pueden ser de gran interés práctico.La complicación más importante es que se manejan sumatorias infinitas y en algunos casos la convergencia puede ser un problema. Varias extensiones de las Fourier también son importantes como la transformada de Fourier y la transformada de Laplace, que se estudiarán más adelante.La teoría de Fourier ha sido aplicada con éxito en la solución de ecuaciones diferenciales, el estudio de vibraciones y ondas, procesamiento de señales, compresión de datos, procesamiento digital de imágenes y en muchos otros campos.
Desarrollos de series de Fourier de funciones pares e impares Recordemos que una función es par si verifica f(−x) = f(x) para cualquier x, y es imparsi f(−x) = −f(x). En un intervalo simétrico como (−p,p) la gráfica de una función par posee simetría respecto al eje y, mientras que la gráfica de una función impar posee simetría con respecto al origen. Estas funciones verifican las siguientes propiedades: • El producto de dos funciones pares es par. • El producto de dos funciones impares es par. • El producto de una función par y una impar es impar. • La suma o la diferencia de dos funciones pares es par. • La suma o la diferencia de dos funciones impares es impar. • Si f es par, entonces Za −a f(x)dx = 2Za 0 f(x)dx. • Si f es impar, entonces Za −a f(x)dx = 0. Gracias a estas propiedades el cálculo de los coeficientes de una serie de Fourier se simplifica de manera importante cuando f es una función par o impar.(Desarrollos en semi-intervalos): En todo lo anterior hemos considerado intervalos centrados en el origen, es decir, de la forma (−p,p). Sin embargo, en ocasiones sería interesante representar una función que se define sólo para el intervalo (0,p) mediante una serie trigonométrica.Esto puede hacerse de muchas formas distintas, suministrando una definición ficticia de la función en el intervalo (−p,0). Por brevedad se presentan los tres casos más comunes. Así, si y = f(x) está definida en el intervalo (0,p), podemos1. (Reflexión par) reflejar la gráfica de la función respecto al eje y, es decir, f(x) = f(−x) para x ∈ (−p,0) (la función es ahora par en el intervalo (−p,p), y por tanto se tendrá un desarrollo en serie de cosenos).2. (Reflexión impar) reflejar la gráfica de la función respecto al origen, es decir, f(x) = −f(−x) para x ∈ (−p,0) (la función es ahora impar en el intervalo (−p,p), y por tanto se tendrá un desarrollo en serie de senos).ConvergenciaEl siguiente teorema expresa las condiciones suficientes de convergencia de una serie de Fourier en un punto. Teorema: Sean f y f0 continuas a trozos en el intervalo (−p,p), es decir, continuas excepto en un número finito de puntos donde presentan discontinuidades de tipo finito.Entonces la serie de Fourier de f en el intervalo converge a f(x) en los puntos x en los que la función es continua.En los puntos x en los que la función es discontinua la serie de Fourier converge al promedio: f(x+) + f(x−) 2 donde f(x+) y f(x−) denotan los límites de f en x por la derecha y por la izquierda, respectivamente. Si la función es periódica de período 2p el resultado anterior se tiene para cualquier x ∈R, no sólo para el intervalo (−p,p). - TEMA VI.-ECUACIONES DIFERENCIALES PARCIALESDefiniciones (Ecuación diferencial, parcial, orden y linealidad)
Las ecuaciones diferenciales ordinarias normalmente resultan de considerar sistemas en los que su comportamiento depende de una sola variable. El comportamiento de los sistemas reales normalmente depende de más de una variable.Las ecuaciones diferenciales parciales pueden tener soluciones que impliquen funciones arbitrarias y soluciones que incluyan un sinfín de constantes.INTRODUCCION A LAS ECUACIONES DIFERENCIALES PARCIALESDefiniciones (ecuación diferencial parcial, orden y linealidad) Son ecuaciones que involucran derivadas parciales de una función desconocida con dos o más variables independientes:Una ED es lineal si es lineal en la función desconocida y en todas sus derivadas, con coeficientes que dependen de las variables independientes. Las ecuaciones (1) y (2) son lineales, mientras las ecuaciones (3) y (4) no lo son.6.2. Forma general de una ecuación diferencial parcial de segundo orden6.3. Clasificación de ecuaciones diferenciales parciales de segundo orden (elípticas, parabólicas e hiperbólicas)EDPs ParabólicasConsideramos como ejemplo la ecuación de difusión del calor en una barra de longitud `. La temperatura u(x,t) como función del tiempo satisface la ecuación diferencial parcial:∂u ∂t (x,t) = α2 ∂2u ∂x2 (x,t) para 0 < x < `, t > 0con condiciones iniciales y de frontera:u(0,t) = T0, u(`,t) = T1 para t > 0 u(x,0) = f(x) para 0 < x < `Esto significa que la barra se mantiene con temperaturas T0 y T1 en los extremos durante todo el tiempo, y tiene una distribución de temperatura f(x) a lo largo de la barra en tiempo t = 0. Por simplicidad, en lo que sigue asumimos T0 = T1 = 0.DiscretizaciónLa longitud ` se divide en m intervalos de longitud h = `/m y los puntos que los determinan son xi = ih para i = 0,1,2,...,m. Para el tiempo, el paso es k y los tiempos discretos son tj = jk donde j = 0,1,2,3,.... Entonces la ecuación diferencial en (xi,tj) es∂u ∂t(xi,tj) = α2 ∂2u ∂x2(xi,tj)Estas derivadas se reemplazan entonces por diferencias finitas correspondientes. Diferentes posibilidades resultan en diferentes métodos.Una ecuación hiperbólica en derivadas parciales es una ecuación diferencial en derivadas parciales de segundo orden, cuyos coeficientes pueden ser constantes o funciones continuas en las variables (x,y), tiene un determinante negativo.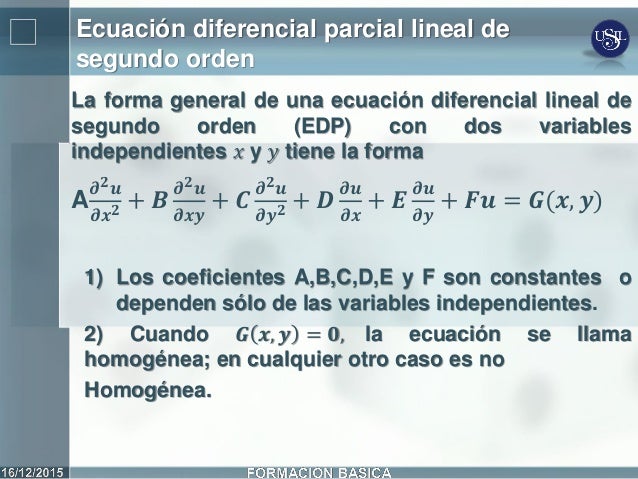












Comentarios
Publicar un comentario